Aktualności
Drugie miejsce w ogólnej klasyfikacji oraz drugie miejsce w konkurencji Design Documentation – z takim sukcesem z międzynarodowych zawodów RoboBoat w USA wracają AGH Solar Boat i skonstruowana przez zespół łódź autonomiczna „Barka”.
RoboBoat – międzynarodowe zawody zespołów studenckich projektujących autonomiczne, zrobotyzowane łodzie odbyły się w dniach 5–11 lutego 2024 r. w Nathan Benderson Park w Sarasocie na Florydzie, USA. Do rywalizacji zakwalifikowało się 16 zespołów z sześciu krajów: Kanady, Indonezji, Meksyku, Turcji, Stanów Zjednoczonych oraz Polski (poza AGH Solar Boat startował także zespół z Politechniki Gdańskiej z konstrukcją SimLE SeaSentine). Wszystkie drużyny przeszły kontrolę bezpieczeństwa, ale do finału zakwalifikowało się 15 z nich.
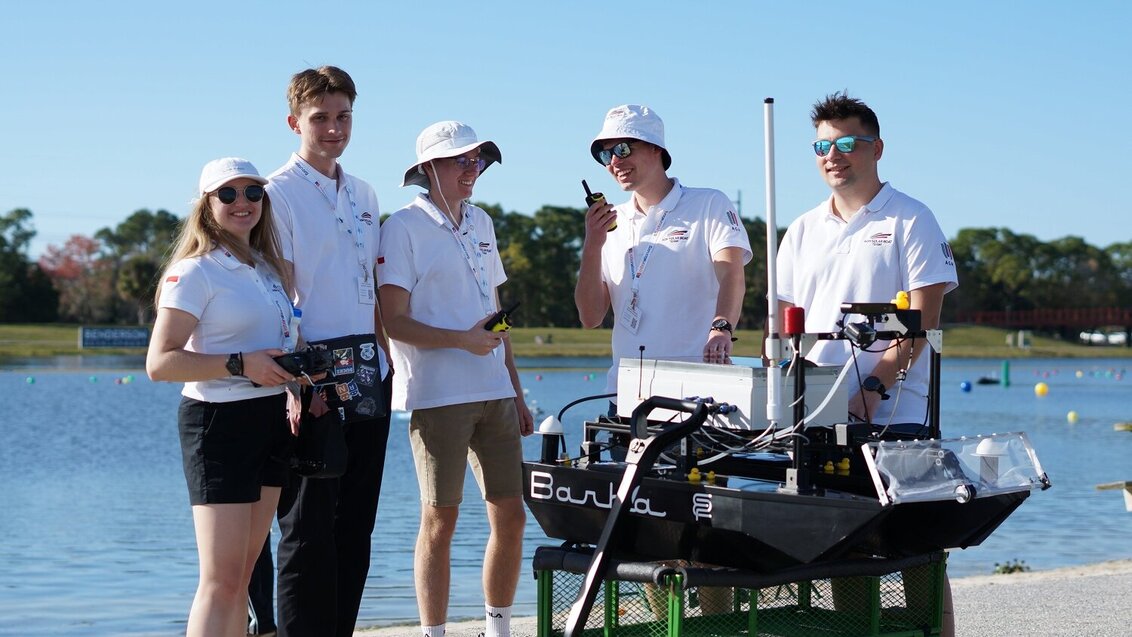
AGH Solar Boat na zawodach RoboBoat reprezentował 6-osobowy zespół składający się z osób odpowiedzialnych za konstrukcję, elektrykę i elektronikę, oprogramowanie oraz marketing. Rywalizująca z innymi konstrukcjami studenckimi „Barka” to modułowy katamaran mierzący 1,3 m długości i 0,75 m szerokości. Wyposażona jest m.in. w system wizyjny i sieć neuronową. Kadłub wykonano z włókien bazaltowych, które umożliwiają przenikanie pola magnetycznego. Ponadto „Barka” została wyposażona w ramię robotyczne, które ma na celu autonomiczne wyławianie obiektów z wody. Cała konstrukcja jest lekka i wytrzymała.
fot. archiwum AGH Solar Boat

fot. archiwum AGH Solar Boat

 Jak nie dać się KLESZCZOM? | Bunkier Nauki odc. 49
Jak nie dać się KLESZCZOM? | Bunkier Nauki odc. 49  Jak podbijamy nanoświat – AGH NAUKA spotkania (nr 25)
Jak podbijamy nanoświat – AGH NAUKA spotkania (nr 25)  Jak samodzielnie wynieść 1000 worków śmieci z lasów? | Bunkier Nauki odc. 48
Jak samodzielnie wynieść 1000 worków śmieci z lasów? | Bunkier Nauki odc. 48  Obalamy MITY na temat sieci 5G – czy jest się czego bać? | Bunkier Nauki odc. 47
Obalamy MITY na temat sieci 5G – czy jest się czego bać? | Bunkier Nauki odc. 47  Świat w dobie AI – AGH NAUKA spotkania (nr 24)
Świat w dobie AI – AGH NAUKA spotkania (nr 24)  Zespół Bioceramiczny AGH ze złotym medalem w Genewie
Zespół Bioceramiczny AGH ze złotym medalem w Genewie  Zbiórka gadżetów na kiermasz charytatywny
Zbiórka gadżetów na kiermasz charytatywny  Profesor Jerzy Lis ponownie Rektorem AGH
Profesor Jerzy Lis ponownie Rektorem AGH  Wejdź do świata odległej przyszłości. Larp „Pierwiastek Rosena”
Wejdź do świata odległej przyszłości. Larp „Pierwiastek Rosena”